 |
The SKIRT project
advanced radiative transfer for astrophysics
|
|
The SKIRT project
advanced radiative transfer for astrophysics
|
#include <TreeNode.hpp>
Public Types | |
| enum | Wall { BACK , FRONT , LEFT , RIGHT , BOTTOM , TOP } |
Public Member Functions | |
| TreeNode (const Box &extent) | |
| TreeNode (TreeNode *parent, int id, const Box &extent) | |
| virtual | ~TreeNode () |
| void | addNeighbor (Wall wall, TreeNode *node) |
| virtual void | addNeighbors ()=0 |
| virtual TreeNode * | child (Vec r)=0 |
| const vector< TreeNode * > & | children () const |
| virtual void | createChildren (int id)=0 |
| void | deleteNeighbor (Wall wall, TreeNode *node) |
| int | id () const |
| bool | isChildless () const |
| TreeNode * | leafChild (Vec r) |
| int | level () const |
| const TreeNode * | neighbor (Wall wall, Vec r) const |
| const vector< TreeNode * > & | neighbors (Wall wall) const |
| TreeNode * | parent () |
| void | sortNeighbors () |
| void | subdivide (vector< TreeNode * > &nodev) |
 Public Member Functions inherited from Box Public Member Functions inherited from Box | |
| Box () | |
| Box (double xmin, double ymin, double zmin, double xmax, double ymax, double zmax) | |
| Box (Vec rmin, Vec rmax) | |
| void | cellIndices (int &i, int &j, int &k, Vec r, int nx, int ny, int nz) const |
| Vec | center () const |
| bool | contains (const Box &box) const |
| bool | contains (double x, double y, double z) const |
| bool | contains (Vec r) const |
| double | diagonal () const |
| const Box & | extent () const |
| void | extent (double &xmin, double &ymin, double &zmin, double &xmax, double &ymax, double &zmax) const |
| Vec | fracPos (double xfrac, double yfrac, double zfrac) const |
| Vec | fracPos (int xd, int yd, int zd, int xn, int yn, int zn) const |
| bool | intersects (const Box &box) const |
| bool | intersects (Vec r, const Vec k, double &smin, double &smax) const |
| bool | intersects (Vec rc, double r) const |
| Vec | rmax () const |
| Vec | rmin () const |
| double | volume () const |
| Vec | widths () const |
| double | xmax () const |
| double | xmin () const |
| double | xwidth () const |
| double | ymax () const |
| double | ymin () const |
| double | ywidth () const |
| double | zmax () const |
| double | zmin () const |
| double | zwidth () const |
Static Public Member Functions | |
| static void | makeNeighbors (Wall wall1, TreeNode *node1, TreeNode *node2) |
Protected Member Functions | |
| void | addChild (TreeNode *child) |
| TreeNode * | childAt (int l) |
| Protected Member Functions inherited from Box | |
| void | setExtent (const Box &extent) |
| void | setExtent (double xmin, double ymin, double zmin, double xmax, double ymax, double zmax) |
Private Attributes | |
| vector< TreeNode * > | _children |
| int | _id |
| int | _level |
| std::array< vector< TreeNode * >, 6 > | _neighbors |
| TreeNode * | _parent |
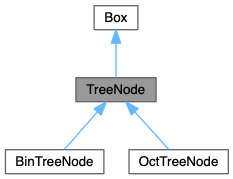
TreeNode is an abstract class that represents nodes in a TreeSpatialGrid. It holds a node identifier, the spatial extent of the node (a cuboid lined up with the coordinate axes), and links to the parent, children and neighbors of the node.
| enum TreeNode::Wall |
This enum contains a constant for each of the six walls in a node. The x-coordinate increases from BACK to FRONT, the y-coordinate increases from LEFT to RIGHT, and the z-coordinate increases from BOTTOM to TOP.
This constructor creates a new tree node with the specified parent node, identifier, and spatial extent. The constructor sets the level of the new node to be one higher than the level of the parent. If the pointer to the parent is null, the level of the new node is zero.
| TreeNode::TreeNode | ( | const Box & | extent | ) |
This constructor creates a new root node with the specified spatial extent. The constructor sets both the node identifier and the level of the new root node to zero.
|
virtual |
Trivial virtual destructor.
|
protected |
This function adds the specified child to the end of the child list.
This function adds a node to the list of neighbors corresponding to a given wall.
|
pure virtual |
This function adds the relevant neighbors to a node with children (the function does nothing if the node doesn't have any children). It considers internal neighbors among the children as well as the neighbors of the parent node (i.e. this node). These external neighbors are distributed among the children depending on the geometry; note that a particular external neighbor may be neighbor to multiple children.
Implemented in BinTreeNode, and OctTreeNode.
This function returns a pointer to the node's child that contains the specified point, assuming that the point is inside the node. Invoking this function on a childless node results in undefined behavior.
Implemented in BinTreeNode, and OctTreeNode.
|
protected |
This function returns a pointer to the node's child with index \(l\). The appropriate range for the index depends on the subclass (e.g. 0-1 for binary tree, 0-7 for octtree). Invoking this function on a childless node of with a child index out of the appropriate range results in undefined behavior.
| const vector< TreeNode * > & TreeNode::children | ( | ) | const |
This function returns a list of pointers to the node's children. The list is either empty or of the size appropriate for the subclass (e.g. 2 for binary tree, 8 for octtree).
|
pure virtual |
This function creates new nodes partitioning the node, and adds these new nodes as its own child nodes. Subdivision happens according to a fixed scheme determined by each subclass. The children are assigned consecutive integer identifiers, starting with the identifier specified as an argument to this function. A node does NOT take ownership of its children, so the caller is responsible for deleting the child nodes when they are no longer needed. Invoking this function on a node that already has children results in undefined behavior.
Implemented in BinTreeNode, and OctTreeNode.
This function deletes a node from the list of neighbors corresponding to a given wall.
| int TreeNode::id | ( | ) | const |
This function returns the ID number of the node.
| bool TreeNode::isChildless | ( | ) | const |
This function returns true if the node has no children, or false if it has children.
This function returns a pointer to the deepest node in the descendent hierarchy of this node that contains the specified position, or the null pointer if the position is outside the node. It uses the child(r) function resursively to locate the appropriate node.
| int TreeNode::level | ( | ) | const |
This function returns the level of the node.
This static function makes the two specified nodes neighbors by adding node2 as a neighbor to node1 at wall1, and adding node1 as a neighbor to node2 at the complementing wall (back/front, left/right, bottom/top).
This function returns a pointer to the node just beyond a given wall that contains the specified position, or null if such a node can't be found by searching the neighbors of that wall. The function expects that the neighbors of the node have been added.
This function returns a list of pointers to the node's neighbors at the given wall. The list may be empty, for example because neighbors are still being added.
| TreeNode * TreeNode::parent | ( | ) |
This function returns a pointer to the parent of the node.
| void TreeNode::sortNeighbors | ( | ) |
This function sorts the neighbor lists for each wall of this node so that neighbors with a larger overlap area are listed first. The function should be called only after neighbors have been added for all nodes in the tree.
| void TreeNode::subdivide | ( | vector< TreeNode * > & | nodev | ) |
This function subdivides the node by creating the appropriate number of child subnodes (through the createChildren() function) and appending pointers to these children to the specified node list. The node identifiers of the child nodes are set so that the node identifier matches the index of the node in the node list. Finally, the neighbor lists are updated (through the addNeighbors() function).